CLASを利用したクレーンの衝突防止システム

はじめに
工事現場などで使われるクレーンの衝突防止システムを株式会社エスシー・マシーナリ様と共同で開発しました。
日本版GPSである「みちびき」の「CLAS(センチメートル級測位補強サービス)」を利用して、クレーンの位置と向きをリアルタイムで取得し、衝突の危険性をクレーンのオペレータに知らせるシステムです。
今回はこの CLAS を利用したクレーンの衝突防止システムについてご紹介します。
クレーンの上下に GNSS を取り付ける
このシステムで対象とするクレーンは、クローラクレーンもしくはタワークレーンと呼ばれるクレーンです。

荷の吊り上げを行うための腕は、ジブと呼ばれます。 このジブの先端に、GNSS アンテナと防水ボックスの中に入れた受信機を取り付けます。

受信機には、セプテントリオ社の Mosaic-CLASを用いています。 防水ボックスの中には、受信機の他に、受信機を制御するためのマイコン(Raspberry Pi)が入っています。
アンテナはヘリカルアンテナ(Tallysman HC976)で、 ジブの角度によらず、アンテナが常に鉛直上向きになるような機構と合わせて使っています。
オペレータの座る運転席(キャビンと呼ばれる)の脇にも、同様に、GNSS のアンテナと防水ボックスに収めた受信機を取り付けます。

GNSS を使って、ジブの先端とジブの作業半径を計測したいのですが、ジブのまさに先端や旋回中心の位置には、アンテナを取り付けることはできません。 そこで、ジブの先端および旋回中心から、実際にアンテナを取り付けた位置までのオフセットをメジャーで計測しておきます。(水平方向のオフセットのみを計測します。)
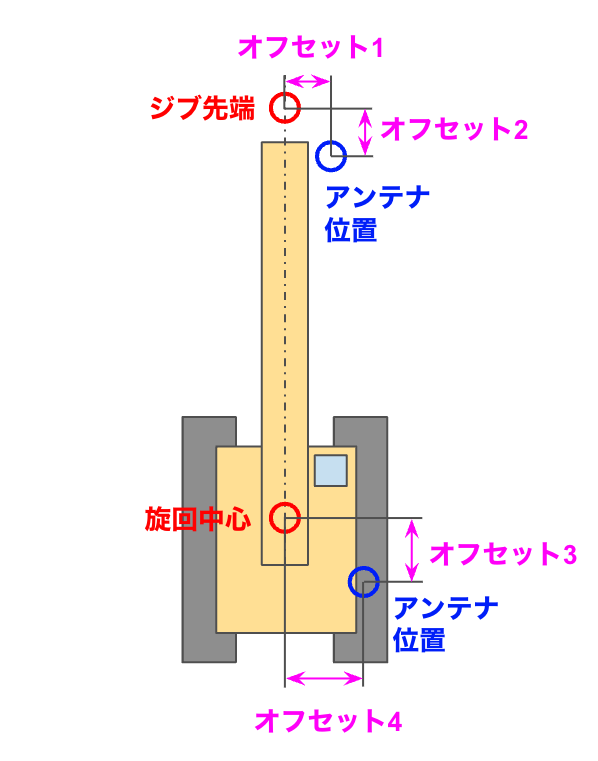
計測された GNSS アンテナの位置から、上記のオフセット分を補正し、ジブの先端位置および旋回中心の位置を算出しています。
ジブ先端とキャビン脇の取り付けた GNSS 受信機には、電源の供給と計測値を受け取るための通信路が必要です。 それには PoE LAN を用いています。
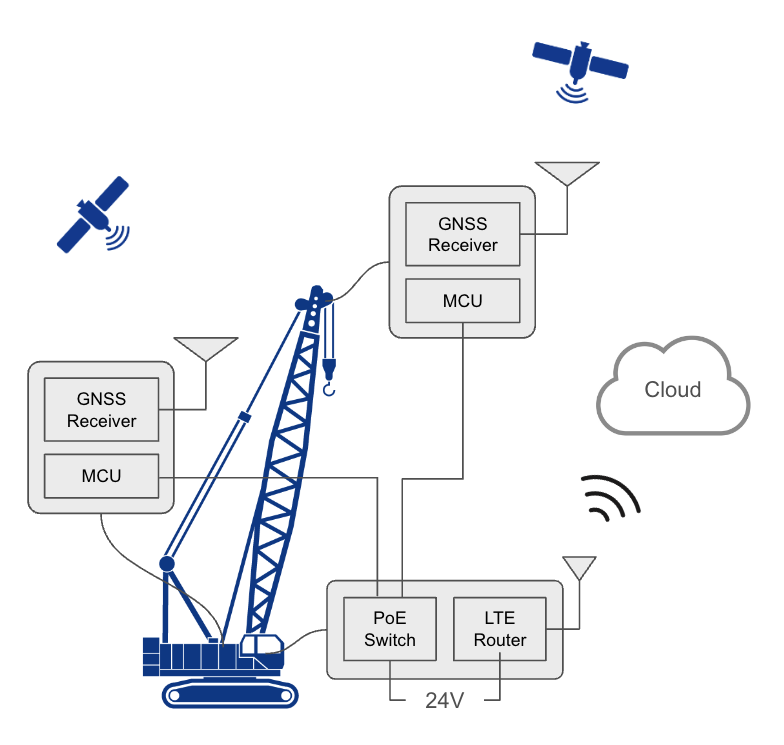
ジブ先端とキャビン脇の受信機ボックスから LAN ケーブルを伸ばし、キャビンの中にある PoE スイッチと繋いでいます。 PoE スイッチは、LTE ルーターと一緒にプラボックスに収めてあり、キャビンの中に置いています。

以上の機材を、対象とする全てのクレーンに対して、取り付け、各アンテナの位置を CLAS 測位により計測します。
毎秒 5 回の頻度(5 Hz)で計測しています。 計測データ(NMEA データ)は、クラウドにあるサーバーに転送され、クラウド上でその後の処理が行われます。
自機から最も近い位置にある他機までの距離を計測する
各クレーンについて、ジブの先端と旋回中心の位置が得られますので、 自機のジブ先端から、各他機のジブまでの距離を計算し、最も近い位置にいる他機までの距離を割り出します。

GNSS では各アンテナの水平位置(X, Y)と高さ(Z)が計測できますが、そのうちの水平位置だけを使っています。
所定の距離以下になったらオペレータにアラートする
キャビンの中には iPad を設置し、iPad のブラウザ画面上に、自機に対する他機の位置とジブの向き、最短位置にある他機までの距離が、 0.2 秒毎に計算され画面が更新されます。
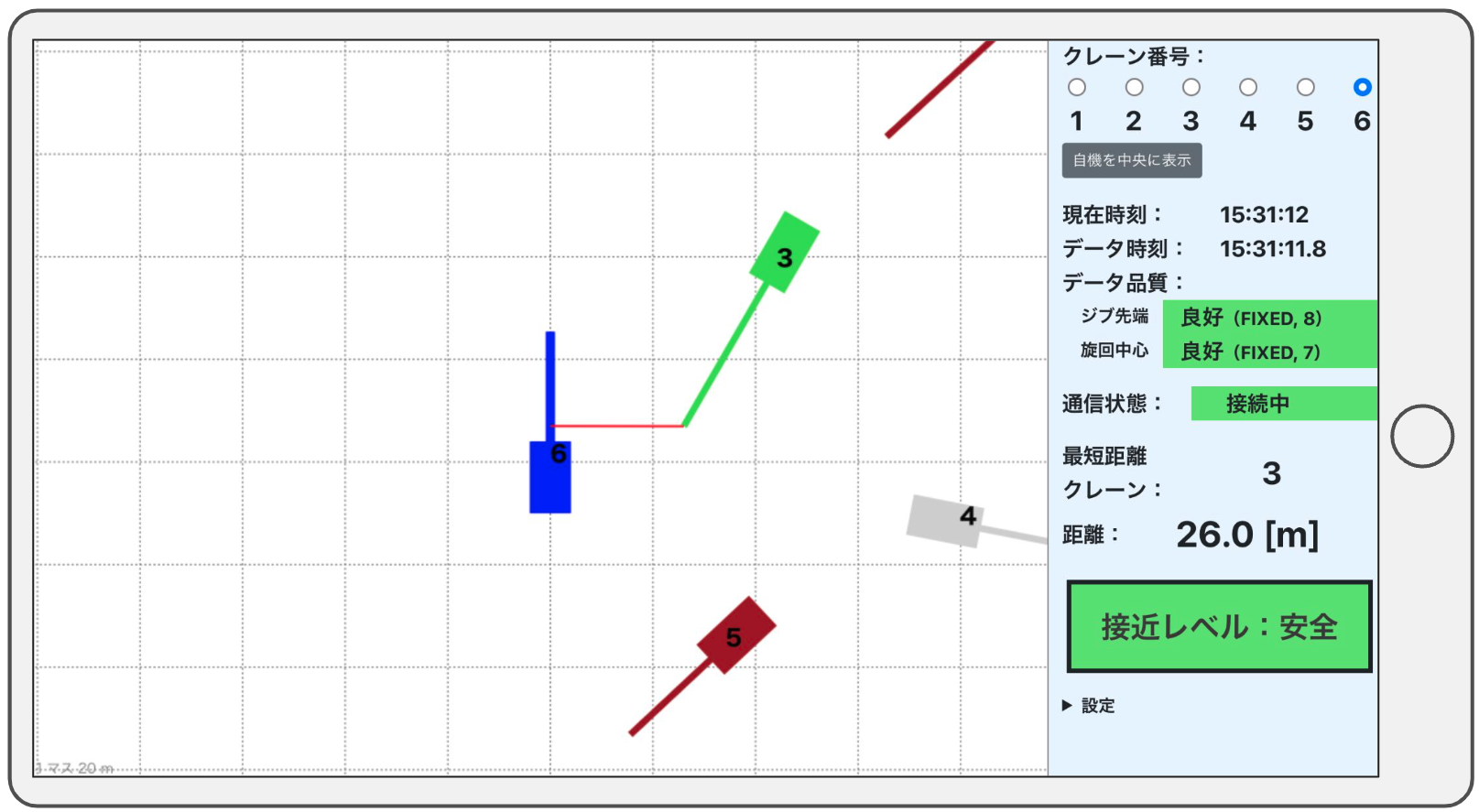
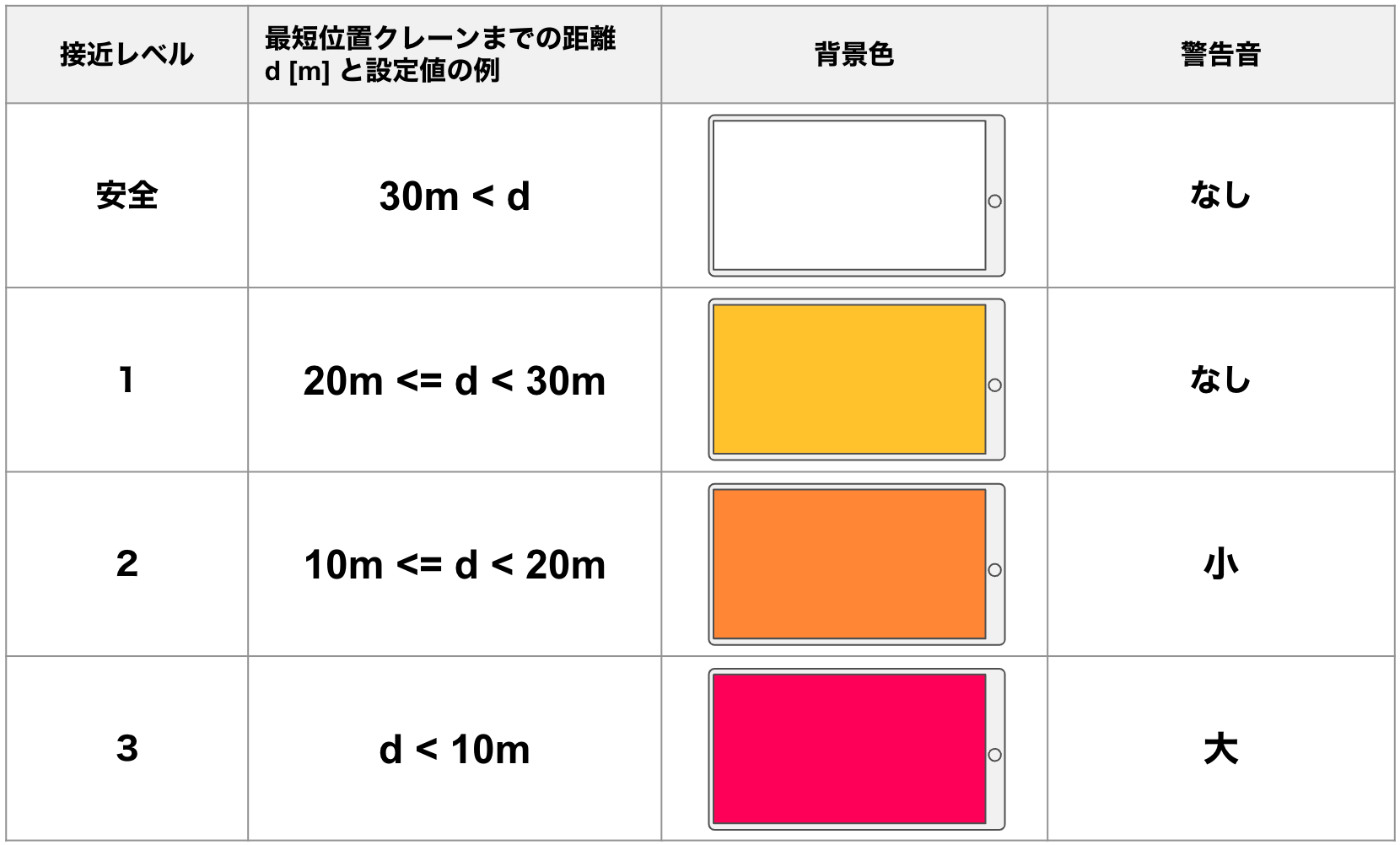
最短位置にある他機までの距離が、あらかじめ設定した値を下回ったら、注意を喚起するアラートを画面に表示し、警告音を鳴らします。 設定値を、下表のように、段階的に設定し(※下表の設定値は仮です)、距離に応じて段階的にアラートをしています。
計測精度について
静止しているクレーンのジブ先端に取り付けた GNSS アンテナの位置を CLAS 測位で計測したときの、ある 5 分間の X, Y, Z の計測値を以下にグラフで示します。
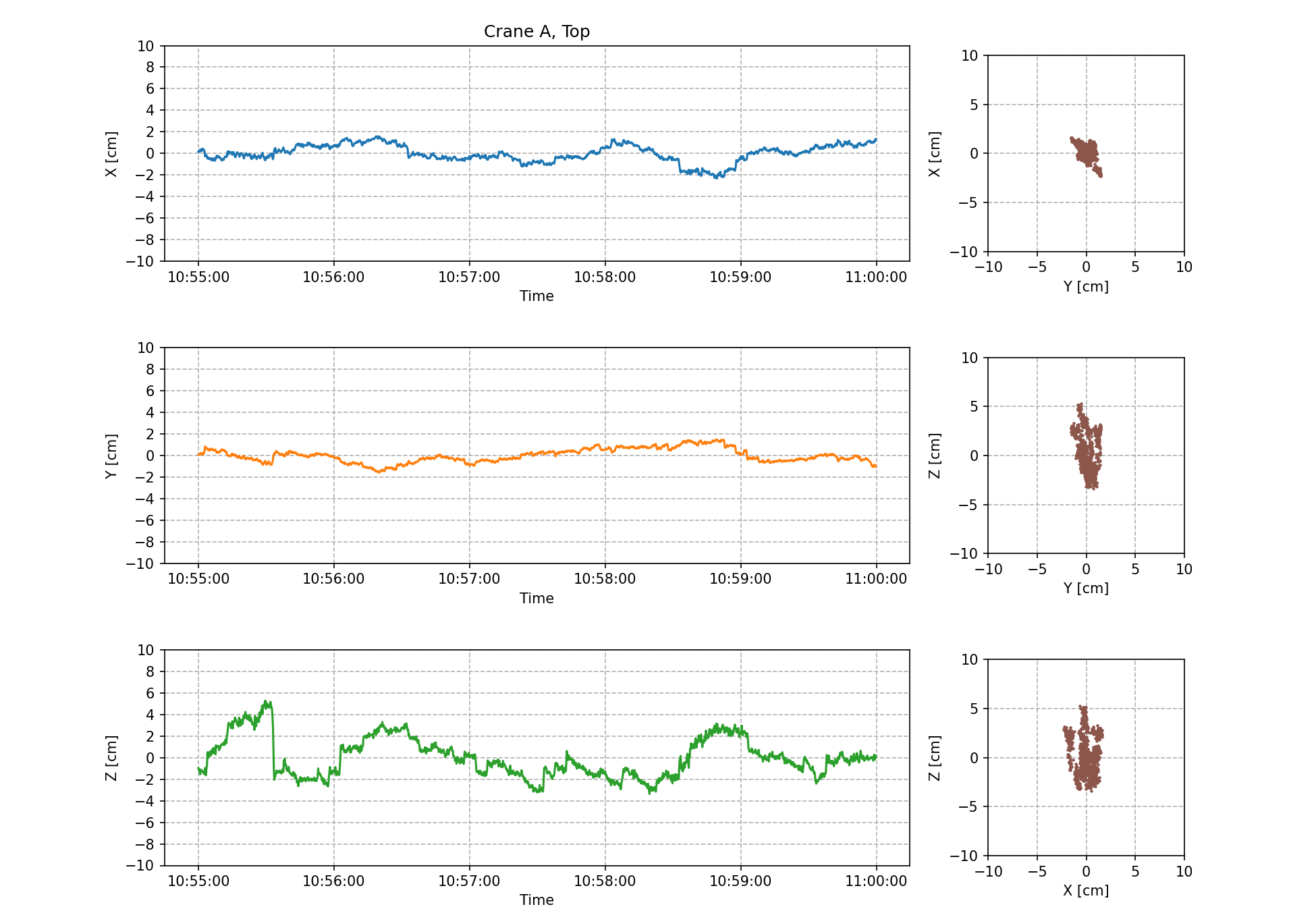
上から、X 座標値の時系列プロットと XY 面の散布図、Y 座標値の時系列プロットと YZ 面の散布図、Z 座標値の時系列プロットと XZ 面の散布図です。
5 分間の平均値を中心にして、計測品質が良好(FIX解)のサンプルのみをプロットしています。 単位は、センチメートル(cm)です。
上記データのクレーンとは別のクレーンのキャビン脇に取り付けた GNSS アンテナの位置について、同時刻の同じグラフを以下に示します。
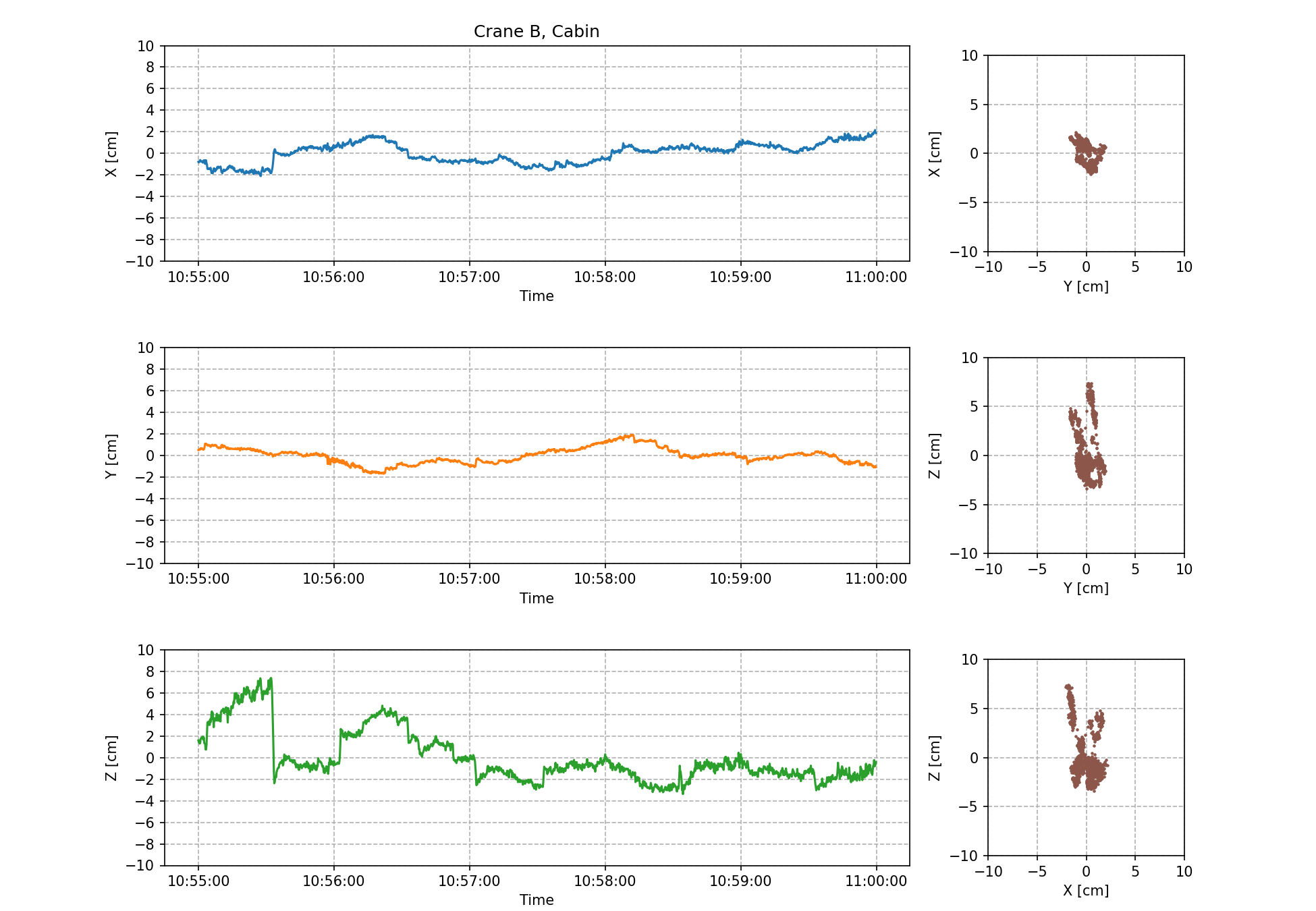
どちらのアンテナも静止していますので、変動している分が計測誤差になります。 CLAS 測位の公称精度は、静止体については、水平 6 cm 以下、垂直 12 cm 以下ですので、想定範囲内の誤差と言えます。
両グラフに共通して見られる傾向は、GNSS 特有の系統誤差によるものと思われます。 系統誤差が大きく変動することもありますが、本システムの場合は、近傍にいるクレーンとの相対位置のみを利用しているため、 系統誤差はある程度相殺され、その影響は限定的と思われます。
FIX 率については、クレーンの周辺環境に依存しますが、オープンスカイ環境では、ジブ先端のアンテナについては、概ね 9 割 5 分 以上でした。 キャビン脇のアンテナについては、7 割から 9 割の間で変動します。 キャビン脇からは、ジブにより、GNSS 衛星の一部が遮られることがあるため、ジブ先端よりも FIX 率は劣ります。
終わりに
CLAS を利用したため、基準局が不要で、シンプルな構成で実現することができました。 クレーンは、それ自体が大きく、RTK ほどの精度が要求されない場合もあり、CLAS が好適な例のひとつだと思います。
一方で、CLAS は利用できる衛星に限りがあり、衛星視界には敏感な方式です。 本システムの別に実現形態としては、Moving Base を利用した方法も考えられると思います。
尚、本システムについては、株式会社エスシー・マシーナリ様と共同で特許出願済です。 システムの導入に関しましては、株式会社エスシー・マシーナリ様にお問い合わせください。
弊社では、GNSS を活用した IoT システムの開発を行なっております。お客様のご要望をお伺いした上で、最適なカスタマイズをご提案可能です。お気軽にお問い合わせください。
お問い合せページ
